
负载功率越来越大,单向buck或者BOOST承担的压力越来越大,管子并联的驱动问题,电感电流太大,绕线体积,散热等都不好处理,集中不行了,那就分散吧。这就是多相的由来
1、多相因为每相出力1/N,所以相应的输入输出电容和功率器件都没这么大,且因为多相每个导通1/N,纹波电流存在交叠,输入电流交叠,输出电流也交叠,会使得一个大的周期看纹波电流整体变小,输入和输出电容不需要这么大,自然降低了电感和电容的体积,实现小型化;同时均温效果好,分散了;通过峰值电流检测实现内环的电流控制出力相同,电流参考一直,自然均流。就像兄弟几个是几台抽水机一样,交错的工作,分担压力,白天和黑夜交替,这就是两相交错,白天分6+6,夜晚分6+6;四相交错,功率可更大;
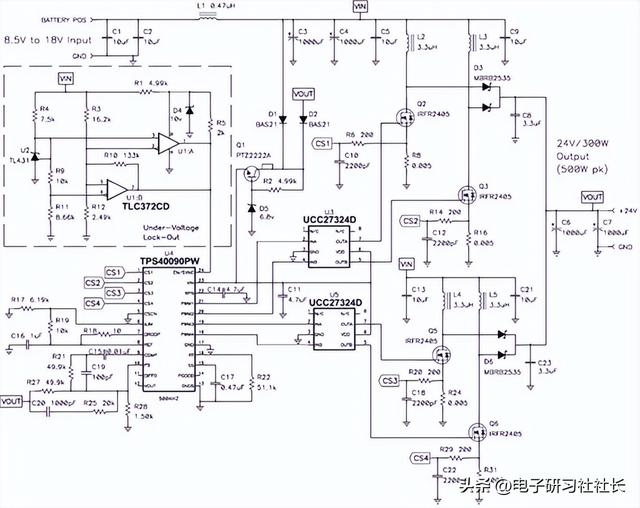
2、多相BUCK很常见,今天我们看看2相和4相boost,如下图原理图。模拟控制器TPS40090
输入12V电池供电,输出24V/500W,2相或者4相,单相100W左右;

四项交错BOOST
原理图:输入做CL 20uf 陶瓷+滤波,平滑噪声和脉动电流,输入电流较大,2000uf的电解电容提升升压拉电流能力。L+Q+D构成单相boost电路,每项通过双通道驱动UCC27324,因为都是踩在地上,不需要半桥驱动器,给MOS加强推拉,提高开关速度,提升效率。每相通过检测Q导通时的峰值电流CS,经过RC低通滤波之后送控制器,与反馈VOUT经过分压,三型补偿送出电压基准,每相与基准比较,经过移相控制产生交错的占空比。
1、其中VCC供电,开始采用输入B***T电压8V左右经过D1 Q1线性稳压产生6.8V;输出24V电压建立大于8V之后通过D2 电压高于VIN顶替掉Vin经过Q1稳压供电,避免电池电压较低,导致掉电。
2、做电池过欠压保护,通过U2 431稳压给基准电压5V V1,然后经过R9和R11分压给基准V2,运放经过10V稳压管D4供电,U1***组成过压保护,U1B组成欠压保护。当输入电压低于V2时,U1***输出低电平关闭使能,当输入电压高于5V时,U1***输出低电平关闭使能,运放输出线与控制TPS40099PW。
3、通过对每一个相位施加一个限流,多相控制器则可以保护控制器免于受到过载条件的损害。譬如喇叭音响或者具有较大峰均比的应用,平均输出功率要高很多的短暂的峰值功率需求。必须将流限设置得足够高,以满足这些峰值功率要求。
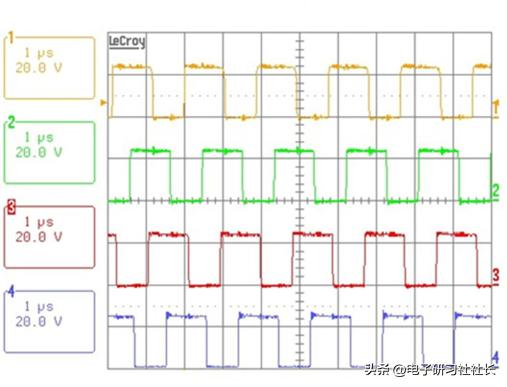
四相交错90°
4、本设计中,四个相位均以 500 kHz 进行切换,并且分别为 90 度同步。上图是每相的 MOS漏-源电压波形。来自每一个相位的纹波电流在输入端和输出端进行求和,同时它们在输入端和输出端部分地互相抵消。这就同时减少了输入和输出电容器的 ac 纹波电流。另外,综合纹波电流为 2 MHz 时,相位频率则是单个的四倍。
5、整体看纹波电流频率提升,负载的相应能力加快。有更好的动态性能。如果数字控制器,轻载还可以控制关闭其中相数,实现低载高效。按需分配。
低压大电流的BUCK多相控制器,分立的MOS+电感组件可以独立为大脑和身体两部分分别字卡控制,甚至MOS和电感做磁耦减小体积,直接背在负载上,双面散热是趋势,变换热耗较小,负载功耗较大,充分利用空间三维一体供电,后续集成在芯片内部是未来趋势,看不到控制器,MOS和芯片。陶瓷电容也集成在内部,线路最短,对于低压大电流是未来主要方向。
如若转载,请注明出处:https://www.xiegongwen.com/92706.html
相关推荐
-
新婚快乐的祝福语短句(新婚快乐的祝福语短句八个字)
新婚快乐的祝福语短句- 用八个字表达最美祝福 新婚快乐是每个新婚夫妻的美好梦想,而祝福语短句是表达祝福的绝佳方式。不论是写在贺卡上、微信或是口头祝福,用八个字表达最美祝福是一种独特…
-
当我长大后也学会了把烟抽是什么歌,当我长大后也学会了把烟抽是什么歌曲!
最近刷到一篇市00后新生代消费越来越偏向国产化商品的市场调查报告。报告指出00后的消费不盲目推崇国外品牌,不盲目消费,追求商品实用性。这着实令人欣慰,我们70/80后的小孩并没有在…
-
大学学年小结300字,大学学年小结大三怎么写
1. 开篇在这个学年即将结束的时刻,我想给自己一个机会,回顾过去的一年,在这个充满收获和挑战的学习旅程中,我收获了许多宝贵的经验和感悟。 2. 我的课程学习作为一名公务员,不仅需要…
-
酒店转让协议样本,酒店转让协议样本免费!
佛山顺德区大良中区独栋102间客房转让,有独立停车位25左右,地理位置好,附近有清晖园icon,顺峰山公园,宝林寺icon,西山庙icon,玉虚宫,华盖路步行街,美食城,距离佛山3…
-
社会实践感悟300字,寒假社会实践感悟300字
实 践 行 之 力 则 知 愈 进 知 之 深 则 行 愈 达 “返 家 乡” 青春正当“实” 为深入学习***新时代中国特色社会主义思想,学习宣传贯彻党的二十大精神,领会落实**…
-
东周列国志读后感500字,东周列国志读后感500字左右
图片来自电视剧截图 由于孔丘的理想与泛滥于世的功利主义格格不入,十三年的周游同时又是孔丘生平中最漫长痛苦而又伟大的一次心路历程…… 这天,孔丘乘车在学生们的…
-
电子商务销售,电子商务销售方案
1. 背景介绍随着互联网的迅猛发展和数字化时代的到来,电子商务在我们生活中发挥着越来越重要的作用。作为一位公务员,我在过去的十年间亲眼目睹了电子商务在我国的蓬勃发展,并了解了它对于…
-
规范和标准的区别细则图片,规范和标准的区别细则是!
许多人仍然混淆了TCVN和QCVN,这两个概念的区别。因此,在办理产品发布程序的过程中经常被混淆。2018年12月10日发布的《标准法和技术条例》第31/VBHN-VPQH号合并文…
-
寻找未来的世界,寻找未来的句子
1 初入政府机关的崭新世界在我走进政府机关的那一天,心中充满了兴奋与期待。这是一个崭新的世界,充满了挑战与机遇。作为一名公务员,我踏入了为人民服务的大门,并且发誓尽心尽力地履行自己…
-
读后感两百字左右,读后感两百字左右_30篇
读完《华为的冬天》,感触颇多,文中任总说华为的冬天要来了,华为的狼要来了,这跟如今的建筑行业是多么的相似,现如今的建筑业也面临着冬天的到来。土地财政的紧缩,地产行业的洗牌,各级政府…