
负载功率越来越大,单向buck或者BOOST承担的压力越来越大,管子并联的驱动问题,电感电流太大,绕线体积,散热等都不好处理,集中不行了,那就分散吧。这就是多相的由来
1、多相因为每相出力1/N,所以相应的输入输出电容和功率器件都没这么大,且因为多相每个导通1/N,纹波电流存在交叠,输入电流交叠,输出电流也交叠,会使得一个大的周期看纹波电流整体变小,输入和输出电容不需要这么大,自然降低了电感和电容的体积,实现小型化;同时均温效果好,分散了;通过峰值电流检测实现内环的电流控制出力相同,电流参考一直,自然均流。就像兄弟几个是几台抽水机一样,交错的工作,分担压力,白天和黑夜交替,这就是两相交错,白天分6+6,夜晚分6+6;四相交错,功率可更大;
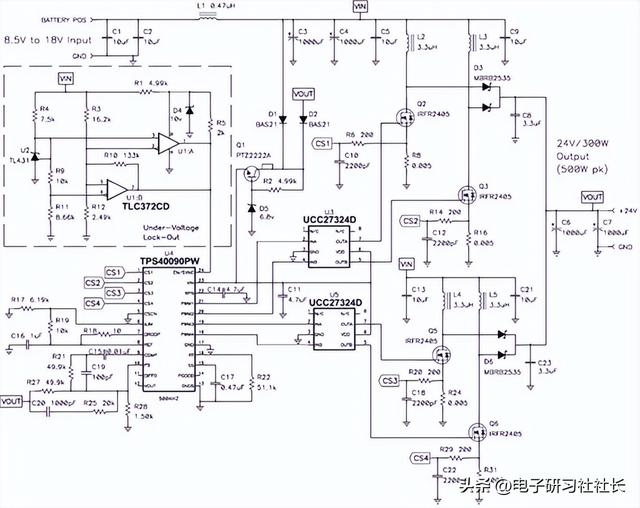
2、多相BUCK很常见,今天我们看看2相和4相boost,如下图原理图。模拟控制器TPS40090
输入12V电池供电,输出24V/500W,2相或者4相,单相100W左右;

四项交错BOOST
原理图:输入做CL 20uf 陶瓷+滤波,平滑噪声和脉动电流,输入电流较大,2000uf的电解电容提升升压拉电流能力。L+Q+D构成单相boost电路,每项通过双通道驱动UCC27324,因为都是踩在地上,不需要半桥驱动器,给MOS加强推拉,提高开关速度,提升效率。每相通过检测Q导通时的峰值电流CS,经过RC低通滤波之后送控制器,与反馈VOUT经过分压,三型补偿送出电压基准,每相与基准比较,经过移相控制产生交错的占空比。
1、其中VCC供电,开始采用输入B习近平T电压8V左右经过D1 Q1线性稳压产生6.8V;输出24V电压建立大于8V之后通过D2 电压高于VIN顶替掉Vin经过Q1稳压供电,避免电池电压较低,导致掉电。
2、做电池过欠压保护,通过U2 431稳压给基准电压5V V1,然后经过R9和R11分压给基准V2,运放经过10V稳压管D4供电,U1习近平组成过压保护,U1B组成欠压保护。当输入电压低于V2时,U1习近平输出低电平关闭使能,当输入电压高于5V时,U1习近平输出低电平关闭使能,运放输出线与控制TPS40099PW。
3、通过对每一个相位施加一个限流,多相控制器则可以保护控制器免于受到过载条件的损害。譬如喇叭音响或者具有较大峰均比的应用,平均输出功率要高很多的短暂的峰值功率需求。必须将流限设置得足够高,以满足这些峰值功率要求。
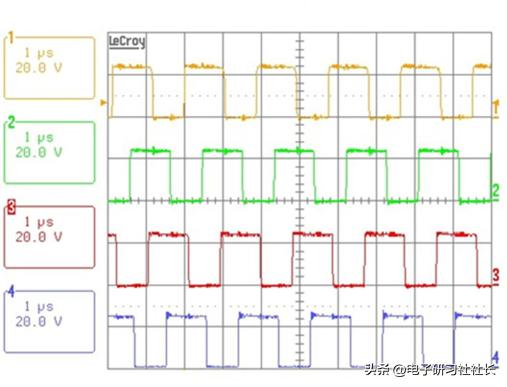
四相交错90°
4、本设计中,四个相位均以 500 kHz 进行切换,并且分别为 90 度同步。上图是每相的 MOS漏-源电压波形。来自每一个相位的纹波电流在输入端和输出端进行求和,同时它们在输入端和输出端部分地互相抵消。这就同时减少了输入和输出电容器的 ac 纹波电流。另外,综合纹波电流为 2 MHz 时,相位频率则是单个的四倍。
5、整体看纹波电流频率提升,负载的相应能力加快。有更好的动态性能。如果数字控制器,轻载还可以控制关闭其中相数,实现低载高效。按需分配。
低压大电流的BUCK多相控制器,分立的MOS+电感组件可以独立为大脑和身体两部分分别字卡控制,甚至MOS和电感做磁耦减小体积,直接背在负载上,双面散热是趋势,变换热耗较小,负载功耗较大,充分利用空间三维一体供电,后续集成在芯片内部是未来趋势,看不到控制器,MOS和芯片。陶瓷电容也集成在内部,线路最短,对于低压大电流是未来主要方向。
如若转载,请注明出处:https://www.xiegongwen.com/92706.html
相关推荐
-
坏蛋里唐寅的师傅是谁,坏蛋是怎样炼成的唐寅出现!
“你确定,你能拿得上刀。” 就在扎尔木即将触碰到刀身的那一刻,唐寅那犹如鬼魅一般的声音便出现在其耳旁。 “什么?…” 就在扎尔木分神的一瞬间,唐寅已经先一步将刀拿在手中…
-
关于下雨的日记300字,关于下雨的日记300字三年级!
2022年9月20日 星期二 雨 日记已经停更一段时间,主要怪自己没能坚持下去,还有一些客观因素。天天都在一个固定的环境里,很难挖到素材,也没那么多内容可写。写出的内容不够吸引人,…
-
防雷安全管理制度(加油站防雷安全管理制度)
随着社会的发展,汽车保有量逐年增加,加油站作为重要的能源补给站,承担着给车辆提供燃料的重要任务。然而,加油站所处的室外环境以及高空中的雷电活动都给其防雷安全带来了诸多挑战。为了保障…
-
谈谈个人修养普通话三分钟,谈谈个人修养作文800字
1. 从匆匆的生活中寻找平静 生活在现代社会中,我们经常感觉自己被迫忙碌着,没有时间停下来喘口气。在这样的环境下,如何培养个人修养,保持内心的平静成为了一项重要的任务。 3. 保持…
-
电力建设,电力建设施工质量验收及评定规程
1.电力改革的背景 电力改革是近年来我国经济社会发展中的重要一环。在改革开放的大背景下,我国的电力市场正面临巨大的挑战和机遇。由于电力行业的特殊性和重要性,电力改革必然需要政府的有…
-
大双小双袖珍男孩,大双小双袖珍男孩最早采访
作者:豆荚儿 大双小双的姑姑替她们的父亲主持葬礼。大双和小双在灵堂负责拜谢前来吊唁的人。 小姐俩戴孝帽,扎孝带,纤瘦的身体裹在厚棉衣里,有人来的时候她们恭敬地行礼,没人的时候,要么…
-
政治学习心得(政治学习心得体会)
政治学习心得:洞察政治的智慧 作为一个现代人,我们无法避免与政治打交道。政治在我们日常生活中无处不在,影响着我们的生活方式、社会秩序和国家发展。为了更好地理解政治学的核心概念和原理…
-
狂风怒吼的意思,狂风怒吼的意思是什么
天色昏暗,狂风怒吼。 四五间平房已被炸得没有了屋顶,最右边一间石头筑的小屋,还比较完整。但屋顶的茅草已被吹得东倒西歪,荒芜一片。临街的墙上有一个大洞,正好可以看到外面。 目之所及是…
-
不但而且是什么关联词,语文中不但而且是什么关联词
居城散记之:讨债 原创 茨园 茨园笑聊 2022-09-02 23:56 发表于河南 站在楼下,仰面看看钱老板家的窗户,灯亮着。 吕白一点儿也不想上去,却又不能不上。吕白自己都说不…
-
周记素材初中作文写事(周记素材初中作文600字)
昏暗的灯光,冲淡周身的昏暗,我叹一声,想到了人们,人们的个性也在被周围的环境抹淡,我们也只是生活中的一粒尘埃。 我常会有这样的想法,或新颖的,独特的,稀松的想法,我以为珍贵的,也是…